This series of blog posts and corresponding talks aims to provide you with a pragmatic view on containers from a historic perspective. Together we will discover modern cloud architectures layer by layer, which means we will start at the Linux Kernel level and end up at writing our own secure cloud native applications.
Simple examples paired with the historic background will guide you from the beginning with a minimal Linux environment up to crafting secure containers, which fit perfectly into todays’ and futures’ orchestration world. In the end it should be much easier to understand how features within the Linux kernel, container tools, runtimes, software defined networks and orchestration software like Kubernetes are designed and how they work under the hood.
Part I: Kernel Space
This first blog post (and talk) is scoped to Linux kernel related topics, which will provide you with the necessary foundation to build up a deep understanding about containers. We will gain an insight about the history of UNIX, Linux and talk about solutions like chroot, namespaces and cgroups combined with hacking our own examples. Besides this we will peel some containers to get a feeling about future topics we will talk about.
Introduction
If we are talking about containers nowadays, most people tend to think of the big blue whale or the white steering wheel on the blue background.
Let’s put these thoughts aside and ask ourselves: What are containers in detail? If we look at the corresponding documentation of Kubernetes we only find explanations about “Why to use containers?“ and lots of references to Docker. Docker itself explains containers as “a standard unit of software“. Their explanations provide a general overview but do not reveal much of the underlying “magic“. Eventually, people tend to imagine containers as cheap virtual machines (VMs), which technically does not come close to the real world. This could be reasoned since the word “container” does not mean anything precisely at all. The same applies to the word “pod” in the container orchestration ecosystem.
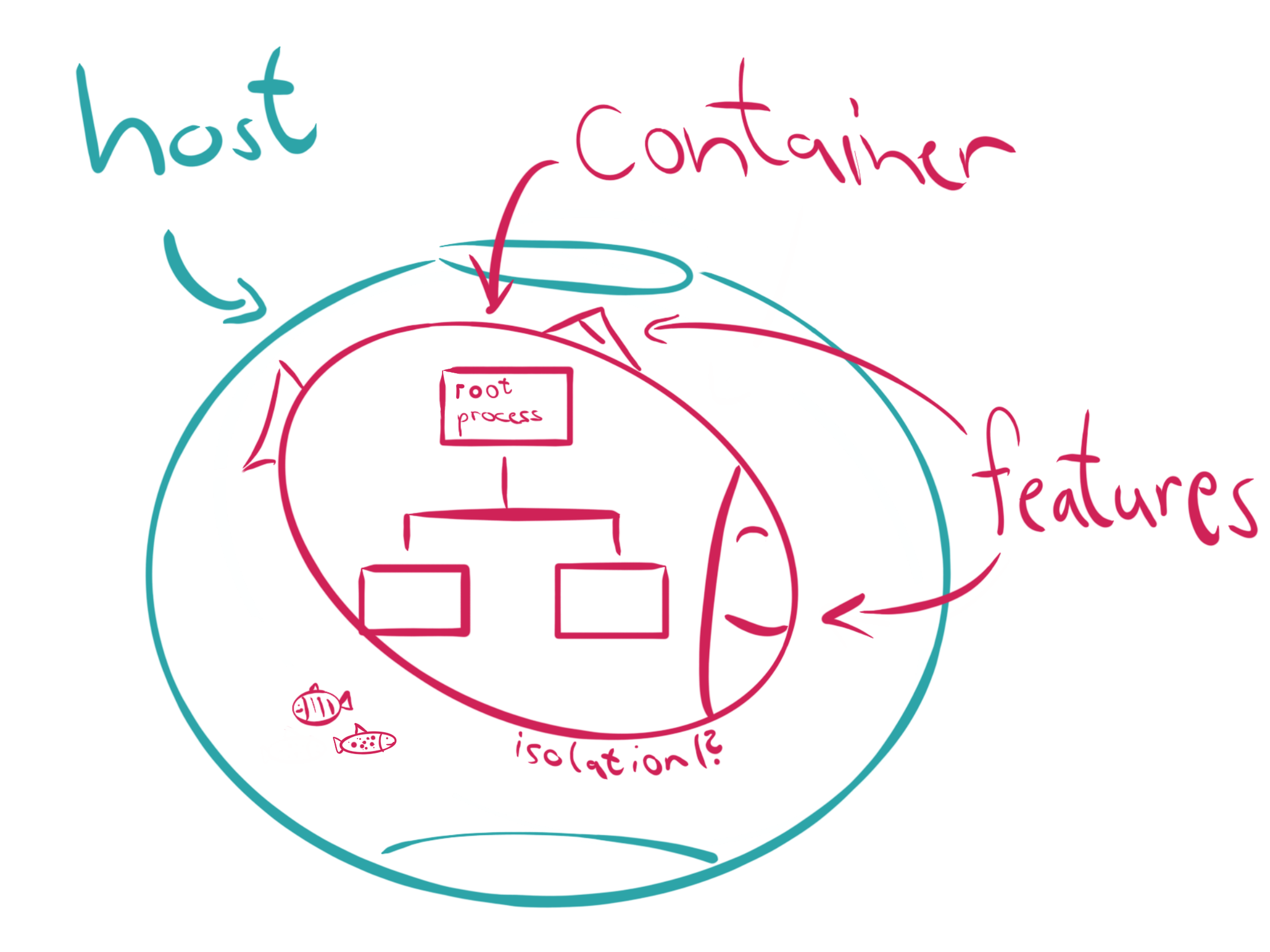
If we strip it down then containers are only isolated groups of processes running on a single host, which fulfill a set of “common” features. Some of these fancy features are built directly into the Linux kernel and mostly all of them have different historical origins.
So containers have to fulfill four major requirements to be acceptable as such:
- Not negotiable: They have to run on a single host. Okay, so two computers cannot run a single container.
- Clearly: They are groups of processes. You might know that Linux processes live inside a tree structure, so we can say containers must have a root process.
- Okay: They need to be isolated, whatever this means in detail.
- Not so clear: They have to fulfill common features. Features in general seem to change over time, so we have to point out what the most common features are.
These requirements alone can lead into confusion and the picture is not clear yet. So let’s start from the historical beginning to keep things simple.
chroot
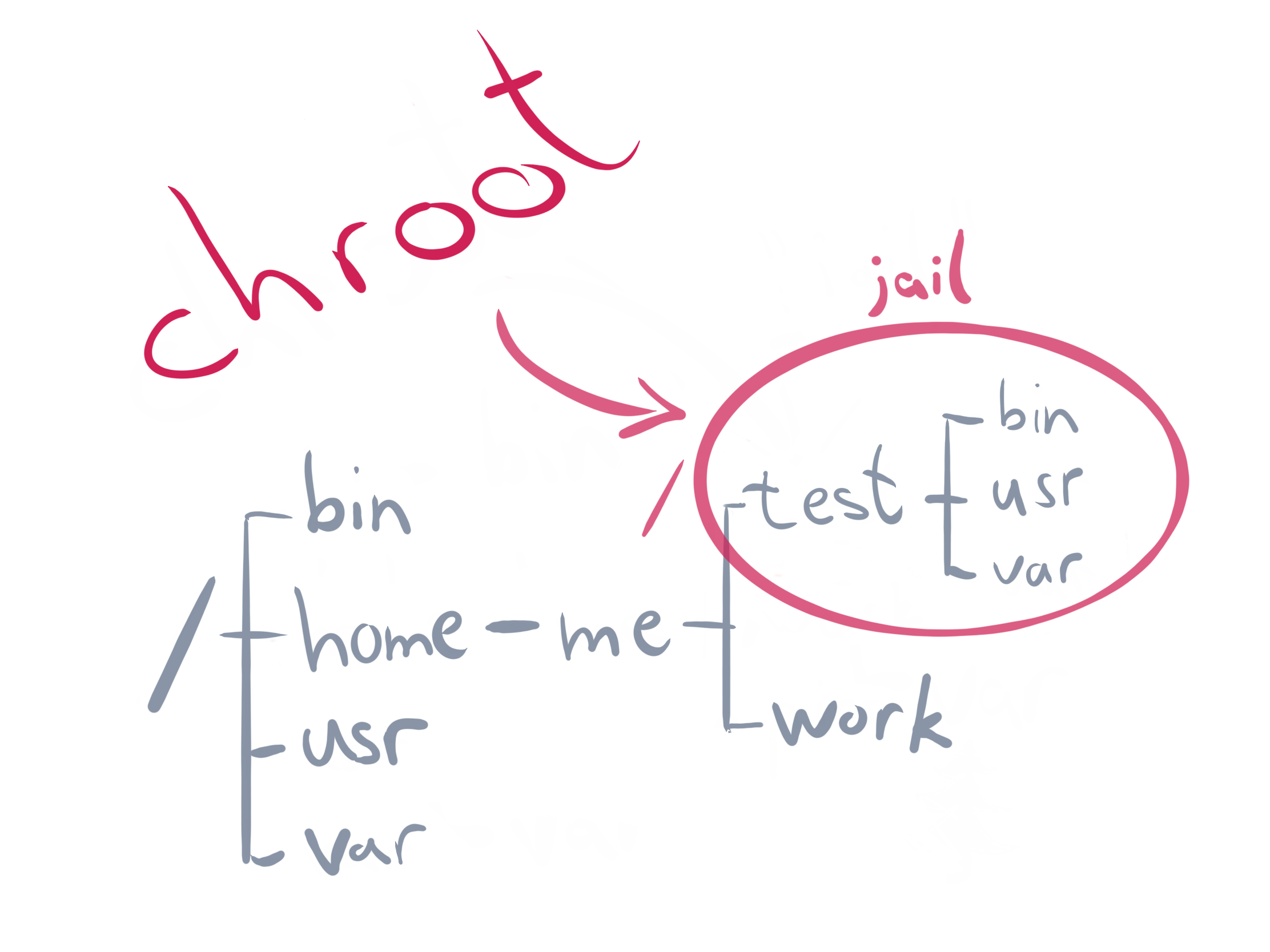
Mostly every UNIX operating system has the possibility to change the root directory of the current running process (and its children). This originates from the first occurrence of chroot in UNIX Version 7 (released 1979), from where it continued the journey into the awesome Berkeley Software Distribution (BSD). In Linux you can nowadays chroot(2) as system call (a kernel API function call) or the corresponding standalone wrapper program. Chroot is also referenced as “jail“, because some person used it as a honeypot to monitor a security hacker back in 1991. So chroot is much older than Linux and it has been (mis)used in the early 2000s for the first approaches in running applications as what we would call today “microservices”. Chroot is currently used by a wide range of applications, for example within build services for different distributions. Nowadays the BSD implementation differs a lots from the Linux one, where we will focus on the latter part for now.
What is needed to run an own chroot environment? Not that much, since something like this already works:
> mkdir -p new-root/{bin,lib64}
> cp /bin/bash new-root/bin
> cp /lib64/{ld-linux-x86-64.so*,libc.so*,libdl.so.2,libreadline.so*,libtinfo.so*} new-root/lib64
> sudo chroot new-root
We create a new root directory, copy a bash shell and its dependencies in and run chroot. This jail is pretty useless: All we have at hand is bash and its builtin functions like cd and pwd.
One might think it could be worth running a statically linked binary in a jail and that would be the same as running a container image. It’s absolutely not, and a jail is not really a standalone security feature but more a good addition to our container world.
The current working directory is left unchanged when calling chroot via a syscall, whereas relative paths can still refer to files outside of the new root. This call changes only the root path and nothing else. Beside this, further calls to chroot do not stack and they will override the current jail. Only privileged processes with the capability CAP_SYS_CHROOT are able to call chroot. At the end of the day the root user can easily escape from a jail by running a program like this:
#include <sys/stat.h>
#include <unistd.h>
int main(void)
{
mkdir(".out", 0755);
chroot(".out");
chdir("../../../../../");
chroot(".");
return execl("/bin/bash", "-i", NULL);
}
We create a new jail by overwriting the current one and change the working directly to some relative path outside of the chroot environment. Another call to chroot might bring us outside of the jail which can be verified by spawning a new interactive bash shell.
Nowadays chroot is not used by container runtimes any more and was replaced by pivot_root(2), which has the benefit of putting the old mounts into a separate directory on calling. These old mounts could be unmounted afterwards to make the filesystem completely invisible to broken out processes.
To continue with a more useful jail we need an appropriate root filesystem (rootfs). This contains all binaries, libraries and the necessary file structure. But where to get one? What about peeling it from an already existing Open Container Initiative (OCI) container, which can be easily done with the two tools skopeo and umoci:
> skopeo copy docker://opensuse/tumbleweed:latest oci:tumbleweed:latest
[output removed]
> sudo umoci unpack –image tumbleweed:latest bundle
[output removed]
Now with our freshly downloaded and extracted rootfs we can chroot into the jail via:
> sudo chroot bundle/rootfs
#
It looks like we’re running inside a fully working environment, right? But what did we achieve? We can see that we may sneak-peak outside the jail from a process perspective:
> mkdir /proc
> mount -t proc proc /proc
> ps aux
[output removed]
There is no process isolation available at all. We can even kill programs running outside of the jail, what a metaphor! Let’s peek into the network devices:
> mkdir /sys
> mount -t sysfs sys /sys
> ls /sys/class/net
eth0 lo
There is no network isolation, too. This missing isolation paired with the ability to leave the jail leads into lots of security related concerns, because jails are sometimes used for wrong (security related) purposes. How to solve this? This is where the Linux namespaces join the party.
Linux Namespaces
Namespaces are a Linux kernel feature which were introduced back in 2002 with Linux 2.4.19. The idea behind a namespace is to wrap certain global system resources in an abstraction layer. This makes it appear like the processes within a namespace have their own isolated instance of the resource. The kernels namespace abstraction allows different groups of processes to have different views of the system.
Not all available namespaces were implemented from the beginning. A full support for what we now understand as “container ready” was finished in kernel version 3.8 back in 2013 with the introduction of the user namespace. We end up having currently seven distinct namespaces implemented: mnt, pid, net, ipc, uts, user and cgroup. No worries, we will discuss them in detail. In September 2016 two additional namespaces were proposed (time and syslog) which are not fully implemented yet. Let’s have a look into the namespace API before digging into certain namespaces.
API
The namespace API of the Linux kernel consists of three main system calls:
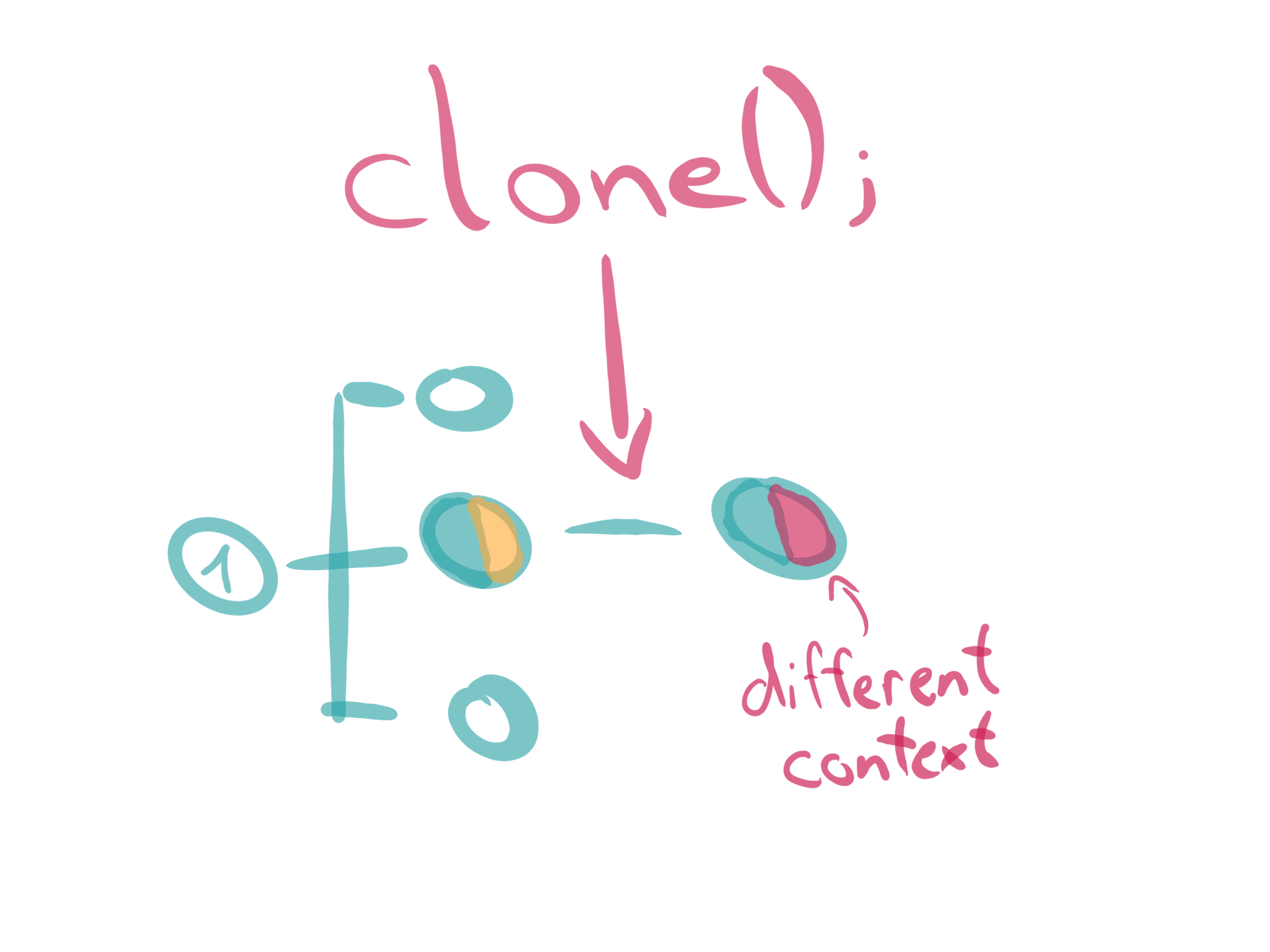
clone
The clone(2) API function creates a new child process, in a manner similar to fork(2). Unlike fork(2), the clone(2) API allows the child process to share parts of its execution context with the calling process, such as the memory space, the table of file descriptors, and the table of signal handlers. You can pass different namespace flags to clone(2)to create new namespaces for the child process.
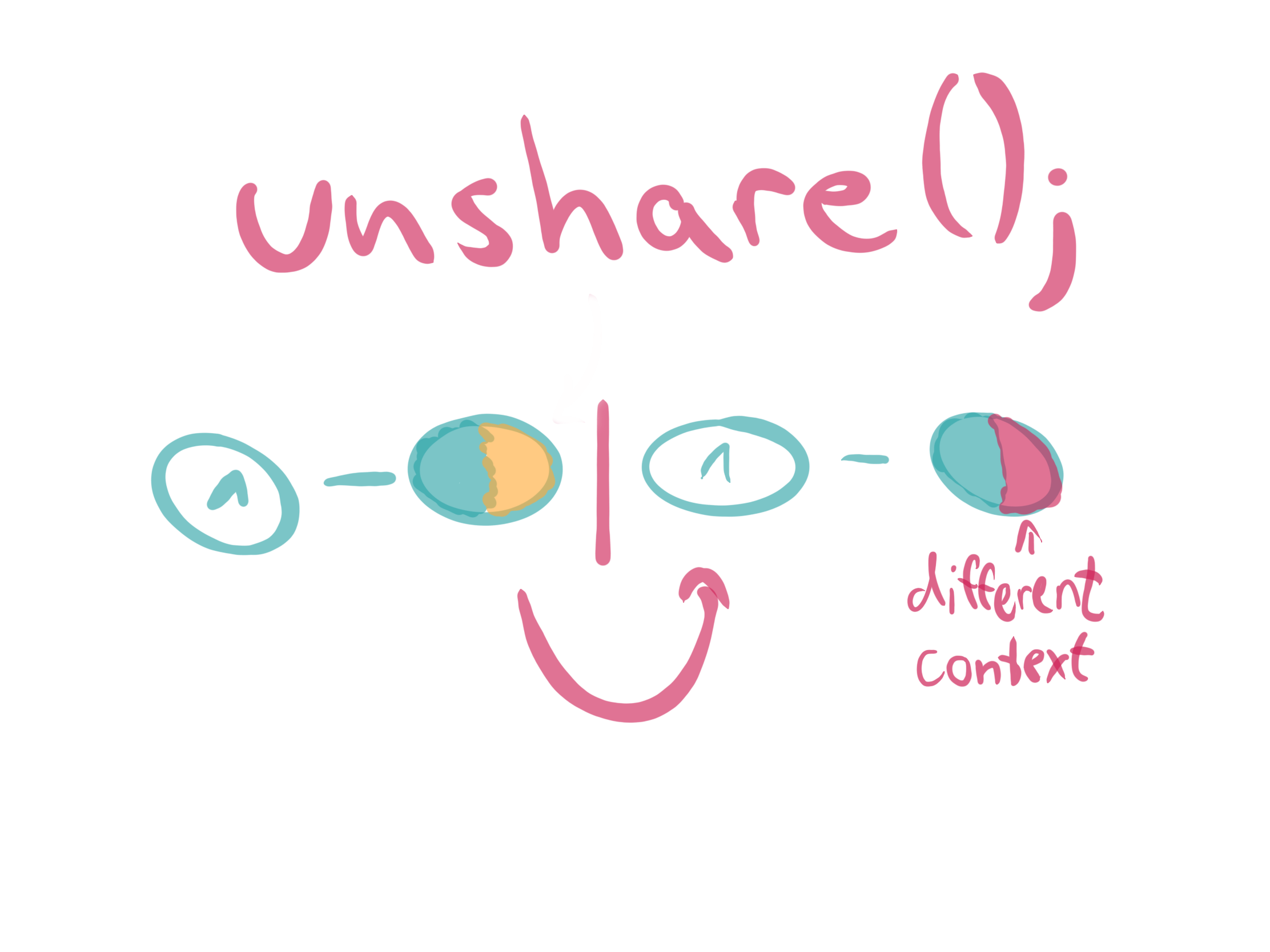
unshare
The function unshare(2) allows a process to disassociate parts of the execution context which are currently being shared with others.
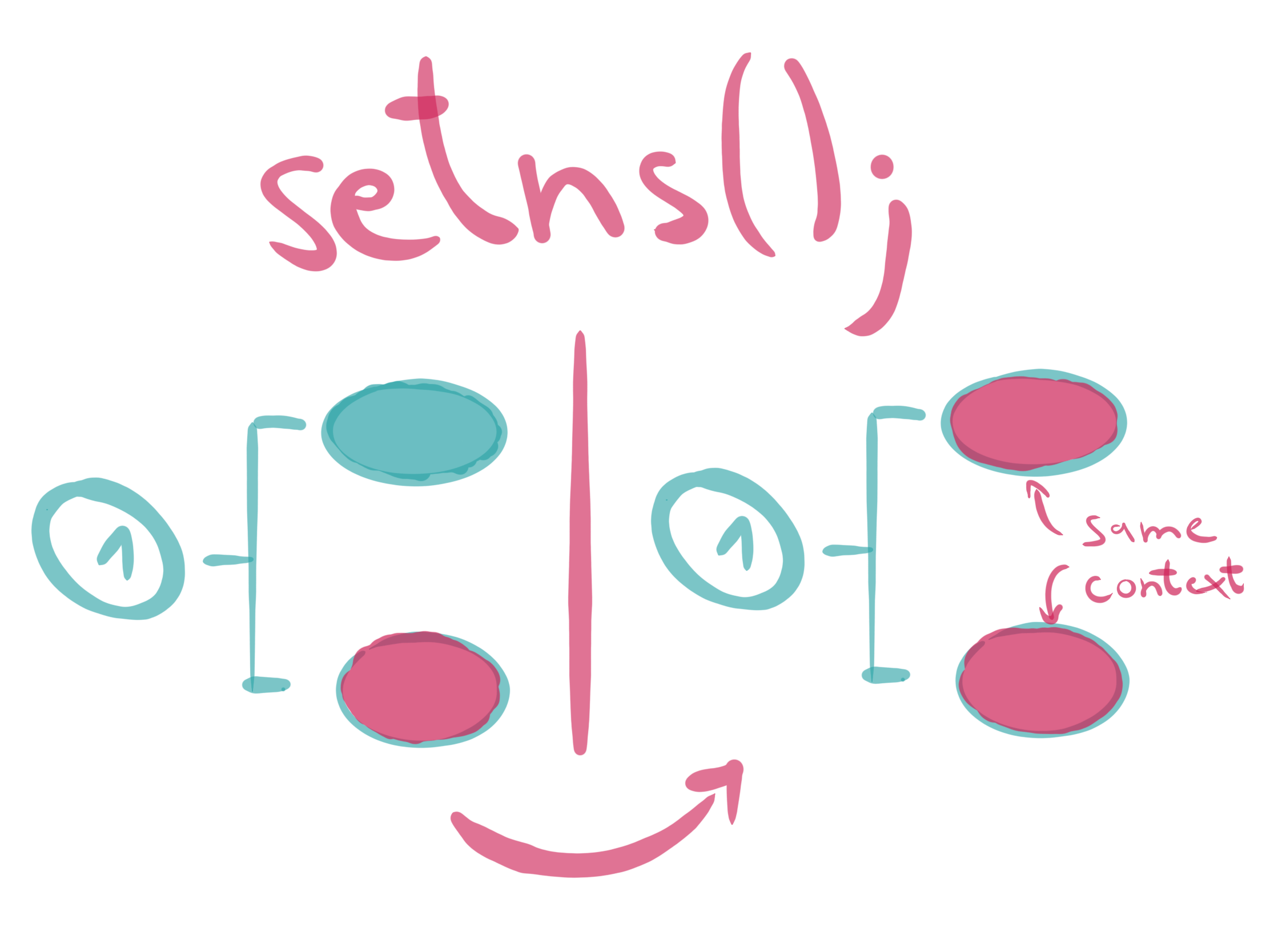
setns
The function setns(2) reassociates the calling thread with the provided namespace file descriptor. This function can be used to join an existing namespace.
proc
Besides the available syscalls, the proc filesystem populates additional namespace related files. Since Linux 3.8, each file in /proc/$PID/ns is a “magic“ link which can be used as a handle for performing operations (like setns(2)) to the referenced namespace.
> ls -Gg /proc/self/ns/
total 0
lrwxrwxrwx 1 0 Feb 6 18:32 cgroup -> 'cgroup:[4026531835]'
lrwxrwxrwx 1 0 Feb 6 18:32 ipc -> 'ipc:[4026531839]'
lrwxrwxrwx 1 0 Feb 6 18:32 mnt -> 'mnt:[4026531840]'
lrwxrwxrwx 1 0 Feb 6 18:32 net -> 'net:[4026532008]'
lrwxrwxrwx 1 0 Feb 6 18:32 pid -> 'pid:[4026531836]'
lrwxrwxrwx 1 0 Feb 6 18:32 pid_for_children -> 'pid:[4026531836]'
lrwxrwxrwx 1 0 Feb 6 18:32 user -> 'user:[4026531837]'
lrwxrwxrwx 1 0 Feb 6 18:32 uts -> 'uts:[4026531838]'
This allows us for example to track in which namespaces certain processes reside. Another way to play around with namespaces apart from the programmatic approach is using tools from the util-linux package. This contains dedicated wrapper programs for the mentioned syscalls. One handy tool related to namespaces within this package is lsns. It lists useful information about all currently accessible namespaces or about a single given one. But now let’s finally get our hands dirty.
Available Namespaces
Mount (mnt)
The first namespace we want to try out is the mnt namespace, which was the first implemented one back in 2002. During that time (mostly) no one thought that multiple namespaces would ever be needed, so they decided to call the namespace clone flag CLONE_NEWNS. This leads into a small inconsistency with other namespace clone flags (I see you suffering!). With the mnt namespace Linux is able to isolate a set of mount points by a group of processes.
A great use case of the mnt namespace is to create environments similar to jails, but in a more secure fashion. How to create such a namespace? This can be easily done via an API function call or the unshare command line tool. So we can do this:
> sudo unshare -m
# mkdir mount-dir
# mount -n -o size=10m -t tmpfs tmpfs mount-dir
# df mount-dir
Filesystem 1K-blocks Used Available Use% Mounted on
tmpfs 10240 0 10240 0% <PATH>/mount-dir
# touch mount-dir/{0,1,2}
Looks like we have a successfully mounted tmpfs, which is not available on the host system level:
> ls mount-dir
> grep mount-dir /proc/mounts
>
The actual memory being used for the mount point is laying in an abstraction layer called Virtual File System (VFS), which is part of the kernel and where every other filesystem is based on. If the namespace gets destroyed, the mount memory is unrecoverably lost. The mount namespace abstraction gives us the possibility to create entire virtual environments in which we are the root user even without root permissions.
On the host system we are able to see the mount point via the mountinfo file inside of the proc filesystem:
> grep mount-dir /proc/$(pgrep -u root bash)/mountinfo
349 399 0:84 / /mount-dir rw,relatime - tmpfs tmpfs rw,size=1024k
How to work with these mount points on a source code level? Well, programs tend to keep a file handle on the corresponding /proc/$PID/ns/mnt file, which refers to the used namespace. In the end mount namespace related implementation scenarios can be really complex, but they give us the power to create flexible container filesystem trees. The last thing I want to mention is that mounts can have different flavors (shared, slave, private, unbindable), which is best explained within the shared subtree documentation of the Linux kernel.
UNIX Time-sharing System (uts)
The UTS namespace was introduced in Linux 2.6.19 (2006) and allows us to unshare the domain- and hostname from the current host system. Let’s give it a try:
> sudo unshare -u
# hostname
nb
# hostname new-hostname
# hostname
new-hostname
And if we look at the system level nothing has changed, hooray:
The UTS namespace is yet another nice addition in containerization, especially when it comes to container networking related topics.
Interprocess Communication (ipc)
IPC namespaces came with Linux 2.6.19 (2006) too and isolate interprocess communication (IPC) resources. In special these are System V IPC objects and POSIX message queues. One use case of this namespace would be to separate the shared memory (SHM) between two processes to avoid misusage. Instead, each process will be able to use the same identifiers for a shared memory segment and produce two distinct regions. When an IPC namespace is destroyed, then all IPC objects in the namespace are automatically destroyed, too.
Process ID (pid)
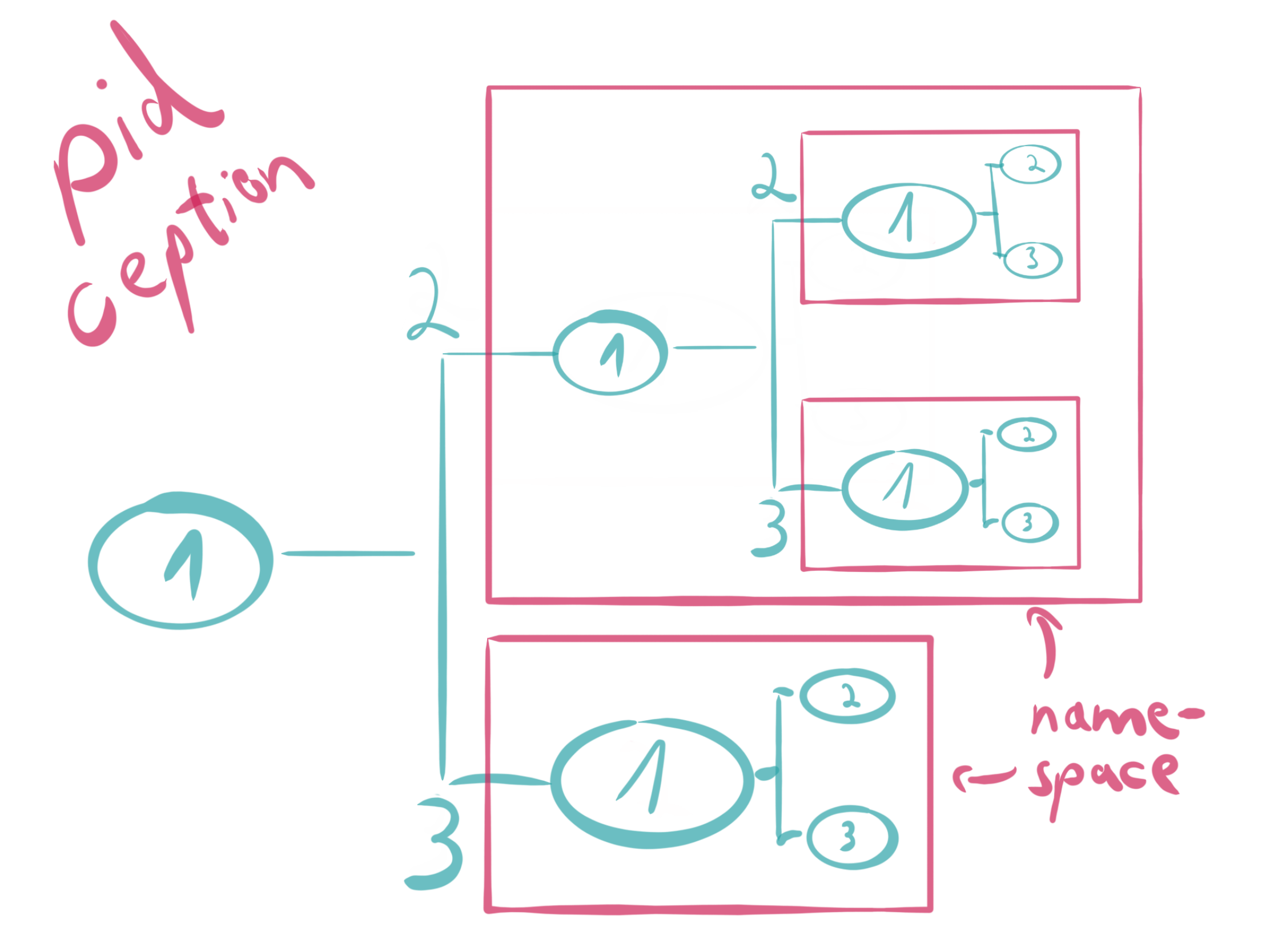
The PID namespace was introduced in Linux 2.6.24 (2008) and gives processes an independent set of process identifiers (PIDs). This means that processes which reside in different namespaces can own the same PID. In the end a process has two PIDs: the PID inside the namespace, and the PID outside the namespace on the host system. The PID namespaces can be nested, so if a new process is created it will have a PID for each namespace from its current namespace up to the initial PID namespace.
The first process created in a PID namespace gets the number 1 and gains all the same special treatment as the usual init process. For example, all processes within the namespace will be re-parented to the namespace’s PID 1 rather than the host PID 1. In addition the termination of this process will immediately terminate all processes in its PID namespace and any descendants. Let’s create a new PID namespace:
> sudo unshare -fp --mount-proc
# ps aux
USER PID %CPU %MEM VSZ RSS TTY STAT START TIME COMMAND
root 1 0.4 0.6 18688 6608 pts/0 S 23:15 0:00 -bash
root 39 0.0 0.1 35480 1768 pts/0 R+ 23:15 0:00 ps aux
Looks isolated, doesn’t it? The --mount-proc flag is needed to re-mount the proc filesystem from the new namespace. Otherwise we would not see the PID subtree corresponding with the namespace. Another option would be to manually mount the proc filesystem via mount -t proc proc /proc, but this also overrides the mount from the host where it has to be remounted afterwards.
Network (net)
Network namespaces were completed in Linux 2.6.29 (2009) and can be used to virtualize the network stack. Each network namespace contains its own resource properties within /proc/net. Furthermore, a network namespace contains only a loopback interface on initial creation. Let’s create one:
> sudo unshare -n
# ip l
1: lo: <LOOPBACK> mtu 65536 qdisc noop state DOWN mode DEFAULT group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
Every network interface (physical or virtual) is present exactly once per namespace. It is possible that an interface will be moved between namespaces. Each namespace contains a private set of IP addresses, its own routing table, socket listing, connection tracking table, firewall, and other network-related resources.
Destroying a network namespace destroys any virtual and moves any physical interfaces within it back to the initial network namespace.
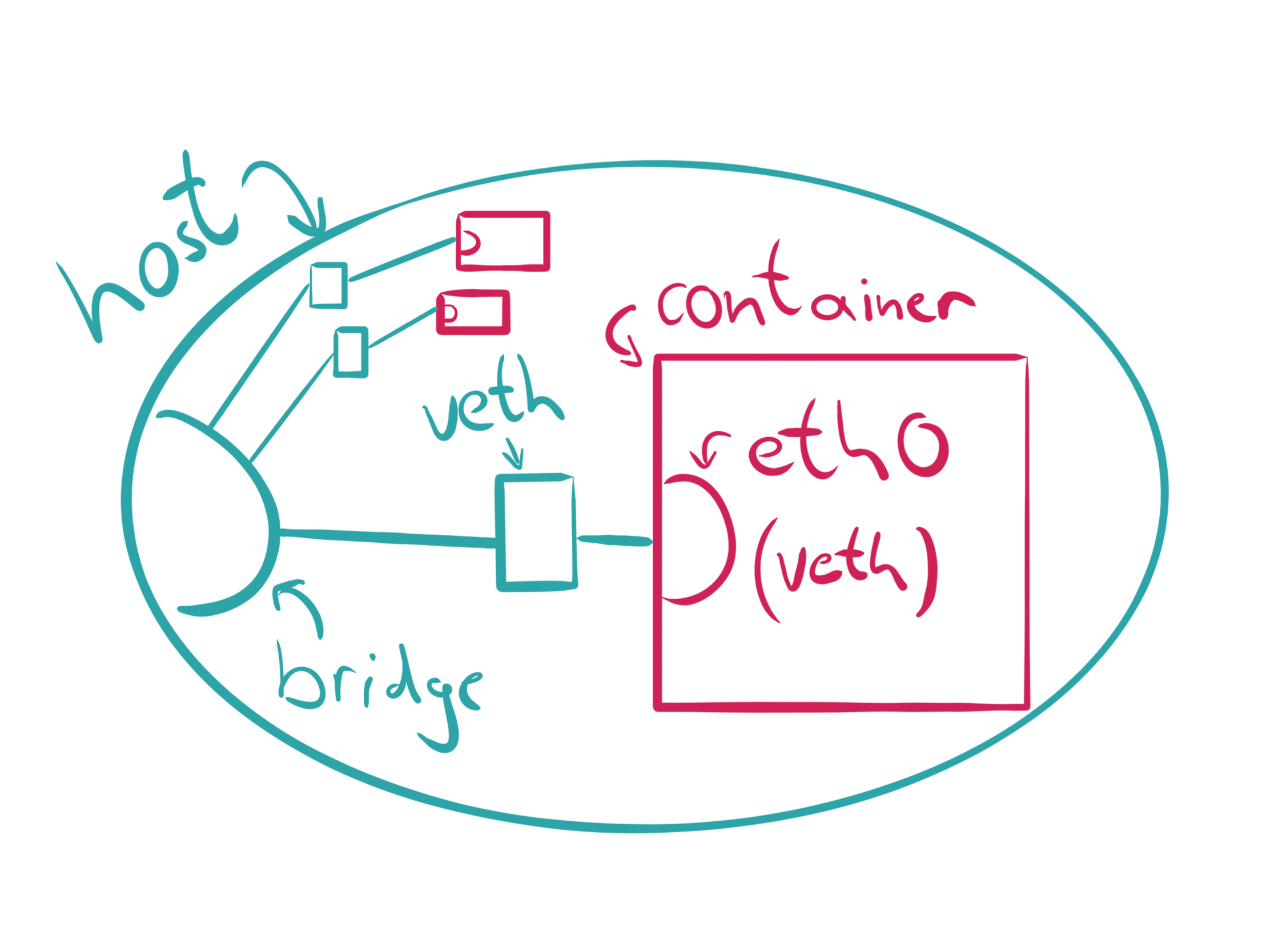
A possible use case for the network namespace is creating Software Defined Networks (SDN) via virtual Ethernet (veth) interface pairs. One end of the network pair will be plugged into a bridged interface whereas the other end will be assigned to the target container. This is how pod networks like flannel work in general.
Let’s see how it works. First, we need to create a new network namespace, which can be done via ip, too:
> sudo ip netns add mynet
> sudo ip netns list
mynet
So we created a new network namespace called mynet. When ip creates a network namespace, it will create a bind mount for it under /var/run/netns too. This allows the namespace to persist even when no processes are running within it.
With ip netns exec we can inspect and manipulate our network namespace even further:
> sudo ip netns exec mynet ip l
1: lo: <LOOPBACK> mtu 65536 qdisc noop state DOWN mode DEFAULT group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
> sudo ip netns exec mynet ping 127.0.0.1
connect: Network is unreachable
The network seems down, let’s bring it up:
> sudo ip netns exec mynet ip link set dev lo up
> sudo ip netns exec mynet ping 127.0.0.1
PING 127.0.0.1 (127.0.0.1) 56(84) bytes of data.
64 bytes from 127.0.0.1: icmp_seq=1 ttl=64 time=0.016 ms
Hooray! Now let’s create a veth pair which should allow communication later on:
> sudo ip link add veth0 type veth peer name veth1
> sudo ip link show type veth
11: veth1@veth0: <BROADCAST,MULTICAST,M-DOWN> mtu 1500 qdisc noop state DOWN mode DEFAULT group default qlen 1000
link/ether b2:d1:fc:31:9c:d3 brd ff:ff:ff:ff:ff:ff
12: veth0@veth1: <BROADCAST,MULTICAST,M-DOWN> mtu 1500 qdisc noop state DOWN mode DEFAULT group default qlen 1000
link/ether ca:0f:37:18:76:52 brd ff:ff:ff:ff:ff:ff
Both interfaces are automatically connected, which means that packets sent to veth0 will be received by veth1 and vice versa. Now we associate one end of the veth pair to our network namespace:
> sudo ip link set veth1 netns mynet
> ip link show type veth
12: veth0@if11: <BROADCAST,MULTICAST> mtu 1500 qdisc noop state DOWN mode DEFAULT group default qlen 1000
link/ether ca:0f:37:18:76:52 brd ff:ff:ff:ff:ff:ff link-netns mynet
Our network interfaces need some addresses for sure:
> sudo ip netns exec mynet ip addr add 172.2.0.1/24 dev veth1
> sudo ip netns exec mynet ip link set dev veth1 up
> sudo ip addr add 172.2.0.2/24 dev veth0
> sudo ip link set dev veth0 up
Communicating in both directions should now be possible:
> ping -c1 172.2.0.1
PING 172.2.0.1 (172.2.0.1) 56(84) bytes of data.
64 bytes from 172.2.0.1: icmp_seq=1 ttl=64 time=0.036 ms
--- 172.2.0.1 ping statistics ---
1 packets transmitted, 1 received, 0% packet loss, time 0ms
rtt min/avg/max/mdev = 0.036/0.036/0.036/0.000 ms
> sudo ip netns exec mynet ping -c1 172.2.0.2
PING 172.2.0.2 (172.2.0.2) 56(84) bytes of data.
64 bytes from 172.2.0.2: icmp_seq=1 ttl=64 time=0.020 ms
--- 172.2.0.2 ping statistics ---
1 packets transmitted, 1 received, 0% packet loss, time 0ms
rtt min/avg/max/mdev = 0.020/0.020/0.020/0.000 ms
It works, but we wouldn’t have any internet access from the network namespace. We would need a network bridge or something similar for that and a default route from the namespace. I leave this task up to you, for now let’s go on to the next namespace.
User ID (user)
With Linux 3.5 (2012) the isolation of user and group IDs was finally possible via namespaces. Linux 3.8 (2013) made it possible to create user namespaces even without being actually privileged. The user namespace enables that a user and group IDs of a process can be different inside and outside of the namespace. An interesting use-case is that a process can have a normal unprivileged user ID outside a user namespace while being fully privileged inside.
Let’s give it a try:
> id -u
1000
> unshare -U
> whoami
nobody
After the namespace creation, the files /proc/$PID/{u,g}id_map expose the mappings for user and group IDs for the PID. These files can be written only once to define the mappings.
In general each line within these files contain a one to one mapping of a range of contiguous user IDs between two user namespaces and could look like this:
> cat /proc/$PID/uid_map
0 1000 1
The example above translates to: With the starting user ID 0 the namespace maps to a range starting at ID 1000. This applies only to the user with the ID 1000, since the defined length is 1.
If now a process tries to access a file, its user and group IDs are mapped into the initial user namespace for the purpose of permission checking. When a process retrieves file user and group IDs (via stat(2)), the IDs are mapped in the opposite direction.
In the unshare example (we did above) we implicitly call getuid(2) before writing an appropriate user mapping, which will result in an unmapped ID. This unmapped ID is automatically converted to the overflow user ID (65534 or the value in /proc/sys/kernel/overflow{g,u}id).
The file /proc/$PID/setgroups contains either allow or deny to enable or disable the permission to call thesetgroups(2) syscall within the user namespace. The file was added to address an added security issue introduced with the user namespace: It would be possible to an unprivileged process to create a new namespace in which the user had all privileges. This formerly unprivileged user would be able to drop groups via setgroups(2) to gain access to files he previously not had.
In the end the user namespace enables great security additions to the container world, which are essential for running rootless containers.
Control Group (cgroup)
Cgroups started their journey 2008 with Linux 2.6.24 as dedicated Linux kernel feature. The main goal of cgroups is to support resource limiting, prioritization, accounting and controlling. A major redesign started with version 2 in 2013, whereas the cgroup namespace was added with Linux 4.6 (2016) to prevent leaking host information into a namespace. The second version of cgroups were released there too and major features were added since then. One latest example is an Out-of-Memory (OOM) killer which adds an ability to kill a cgroup as a single unit to guarantee the overall integrity of the workload.
Let’s play around with cgroups and create a new one. By default, the kernel exposes cgroups in /sys/fs/cgroup. To create a new cgroup, we simply create a new sub-directory on that location:
> sudo mkdir /sys/fs/cgroup/memory/demo
> ls /sys/fs/cgroup/memory/demo
cgroup.clone_children
cgroup.event_control
cgroup.procs
memory.failcnt
memory.force_empty
memory.kmem.failcnt
memory.kmem.limit_in_bytes
memory.kmem.max_usage_in_bytes
memory.kmem.slabinfo
memory.kmem.tcp.failcnt
memory.kmem.tcp.limit_in_bytes
memory.kmem.tcp.max_usage_in_bytes
memory.kmem.tcp.usage_in_bytes
memory.kmem.usage_in_bytes
memory.limit_in_bytes
memory.max_usage_in_bytes
memory.move_charge_at_immigrate
memory.numa_stat
memory.oom_control
memory.pressure_level
memory.soft_limit_in_bytes
memory.stat
memory.swappiness
memory.usage_in_bytes
memory.use_hierarchy
notify_on_release
tasks
You can see that there are already some default values exposed there. Now, we are able to set the memory limits for that cgroup. We are also turning off swap to make our example implementation work.
> sudo su
# echo 100000000 > /sys/fs/cgroup/memory/demo/memory.limit_in_bytes
# echo 0 > /sys/fs/cgroup/memory/demo/memory.swappiness
To assign a process to a cgroup we can write the corresponding PID to the cgroup.procs file:
# echo $$ > /sys/fs/cgroup/memory/demo/cgroup.procs
Now we can execute a sample application to consume more than the allowed 100 megabytes of memory. The application I used is written in Rust and looks like this:
pub fn main() {
let mut vec = vec![];
loop {
vec.extend_from_slice(&[1u8; 10_000_000]);
println!("{}0 MB", vec.len() / 10_000_000);
}
}
If we run the program, we see that the PID will be killed because of the set memory constraints. So our host system is still usable.
# rustc memory.rs
# ./memory
10 MB
20 MB
30 MB
40 MB
50 MB
60 MB
70 MB
80 MB
90 MB
Killed
Composing Namespaces
Namespaces are composable, too! This reveals their true power and makes it possible to have isolated pid namespaces which share the same network interface, like it is done in Kubernetes Pods.
To demonstrate this, let’s create a new namespace with an isolated PID:
> sudo unshare -fp --mount-proc
# ps aux
USER PID %CPU %MEM VSZ RSS TTY STAT START TIME COMMAND
root 1 0.1 0.6 18688 6904 pts/0 S 23:36 0:00 -bash
root 39 0.0 0.1 35480 1836 pts/0 R+ 23:36 0:00 ps aux
The setns(2) syscall with its appropriate wrapper program nsenter can now be used to join the namespace. For this we have to find out which namespace we want to join:
> export PID=$(pgrep -u root bash)
> sudo ls -l /proc/$PID/ns
Now, it is easily possible to join the namespace via nsenter:
> sudo nsenter --pid=/proc/$PID/ns/pid unshare --mount-proc
# ps aux
root 1 0.1 0.0 10804 8840 pts/1 S+ 14:25 0:00 -bash
root 48 3.9 0.0 10804 8796 pts/3 S 14:26 0:00 -bash
root 88 0.0 0.0 7700 3760 pts/3 R+ 14:26 0:00 ps aux
We can now see that we are member of the same PID namespace! It is also possible to enter already running containers via nsenter, but this topic will be covered later on.
Demo Application
A small demo application can be used to create a simple isolated environment via the namespace API:
#define _GNU_SOURCE
#include <errno.h>
#include <sched.h>
#include <stdio.h>
#include <string.h>
#include <sys/mount.h>
#include <sys/msg.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
#define STACKSIZE (1024 * 1024)
static char stack[STACKSIZE];
void print_err(char const * const reason)
{
fprintf(stderr, "Error %s: %s\n", reason, strerror(errno));
}
int exec(void * args)
{
// Remount proc
if (mount("proc", "/proc", "proc", 0, "") != 0) {
print_err("mounting proc");
return 1;
}
// Set a new hostname
char const * const hostname = "new-hostname";
if (sethostname(hostname, strlen(hostname)) != 0) {
print_err("setting hostname");
return 1;
}
// Create a message queue
key_t key = {0};
if (msgget(key, IPC_CREAT) == -1) {
print_err("creating message queue");
return 1;
}
// Execute the given command
char ** const argv = args;
if (execvp(argv[0], argv) != 0) {
print_err("executing command");
return 1;
}
return 0;
}
int main(int argc, char ** argv)
{
// Provide some feedback about the usage
if (argc < 2) {
fprintf(stderr, "No command specified\n");
return 1;
}
// Namespace flags
const int flags = CLONE_NEWNET | CLONE_NEWUTS | CLONE_NEWNS | CLONE_NEWIPC |
CLONE_NEWPID | CLONE_NEWUSER | SIGCHLD;
// Create a new child process
pid_t pid = clone(exec, stack + STACKSIZE, flags, &argv[1]);
if (pid < 0) {
print_err("calling clone");
return 1;
}
// Wait for the process to finish
int status = 0;
if (waitpid(pid, &status, 0) == -1) {
print_err("waiting for pid");
return 1;
}
// Return the exit code
return WEXITSTATUS(status);
}
Purpose of the application is to spawn a new child process in different namespaces. Every command provided to the executable will be forwarded to the new child process. The application terminates, when the command execution is done. You can test and verify the implementation via:
> gcc -o namespaces namespaces.c
> ./namespaces ip a
1: lo: <LOOPBACK> mtu 65536 qdisc noop state DOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
> ./namespaces ps aux
USER PID %CPU %MEM VSZ RSS TTY STAT START TIME COMMAND
nobody 1 0.0 0.1 36524 1828 pts/0 R+ 23:46 0:00 ps aux
> ./namespaces whoami
nobody
This is truly not a working container, but it should give you a slight feeling about how container runtimes leverage namespaces to manage containers. Feel free to use this example as a starting point for your own little experiments with the namespace API.
Putting it all Together
Do you remember the rootfs we extracted from the image within the chroot section? We can use a low level container runtime like runc to easily run a container from the rootfs:
> sudo runc run -b bundle container
If we now inspect the system namespaces, we see that runc already created mnt, uts, ipc, pid and net for us:
> sudo lsns | grep bash
4026532499 mnt 1 6409 root /bin/bash
4026532500 uts 1 6409 root /bin/bash
4026532504 ipc 1 6409 root /bin/bash
4026532505 pid 1 6409 root /bin/bash
4026532511 net 1 6409 root /bin/bash
I will stop here and we will learn more about container runtimes and what they do, in upcoming blog posts and talks.
Conclusion
I really hope you enjoyed the read and that the mysteries about containers are now a little bit more fathomable. If you run Linux it is easy to play around with different isolation techniques from scratch. In the end a container runtime nicely uses all these isolation features on different abstraction levels to provide a stable and robust development and production platform for containers.
There are lots of topics which were not covered here because I wanted to stay at a stable level of detail. For sure, a great resource for digging deeper into the topic of Linux namespaces is the Linux programmers manual: NAMESPACES(7).
Feel free to drop me a line or get in contact with me for any questions or feedback. The next blog posts will cover container runtimes, security and the overall ecosystem around latest container technologies. Stay tuned!
You can find all necessary resources about this series on GitHub.